ABB机器人如何去进行新示教器创建工具工件坐标系
Omni Core 控制器是
ABB机器人*新推出的控制系统,控制柜如下。
该系统目前支持YUMI单臂和SCARA910 INV机器人。
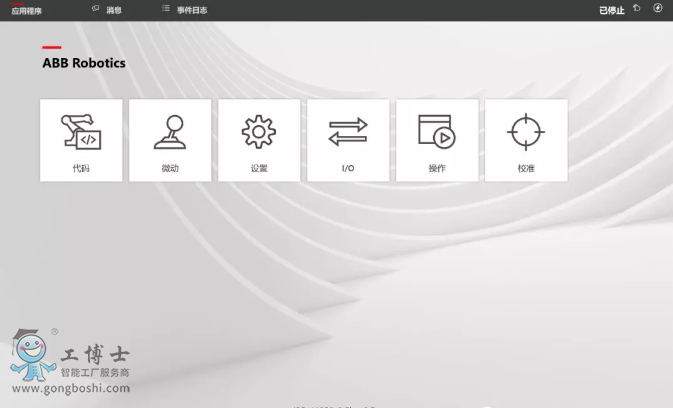
搭配该系统,需要使用Robotware7。系统使用下图的新型示教器。
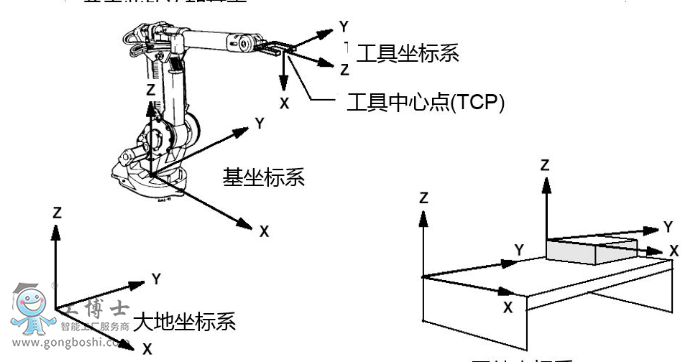
工具TCP和工件坐标系是ABB机器人两个非常重要的数据,在新示教器系统如何创建?
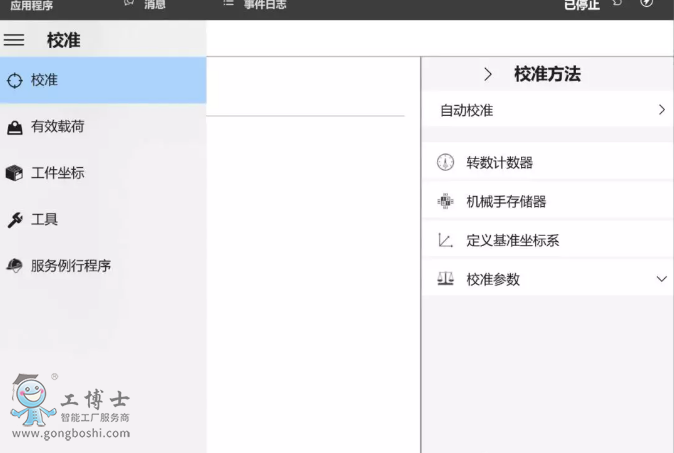
进入主菜单,选择“校准“
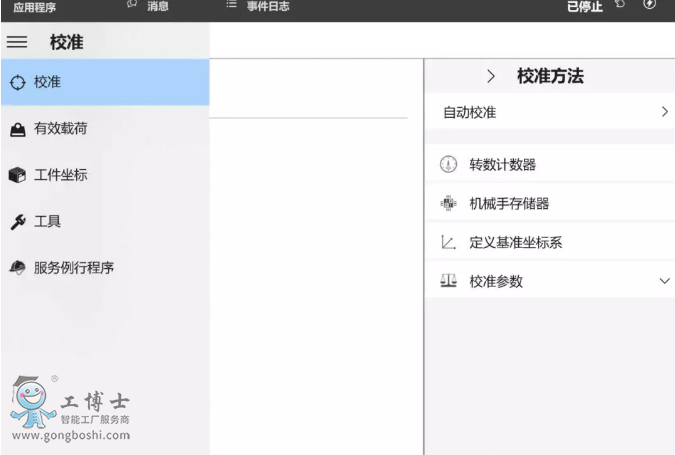
点击左侧“校准”,选择“工具”
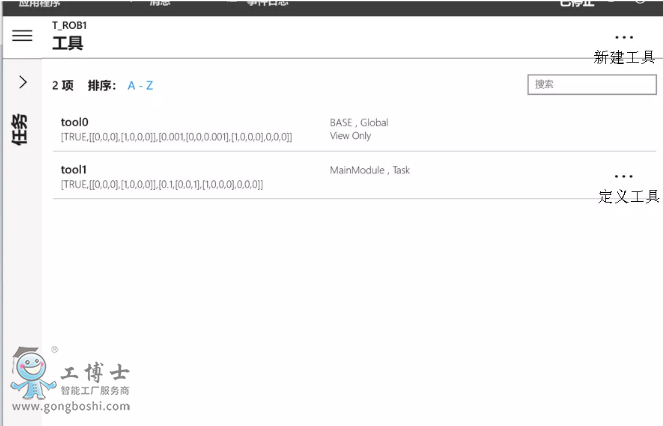
点击右上角”…”可以新建工具,点击tool1后的省略号可以定义工具
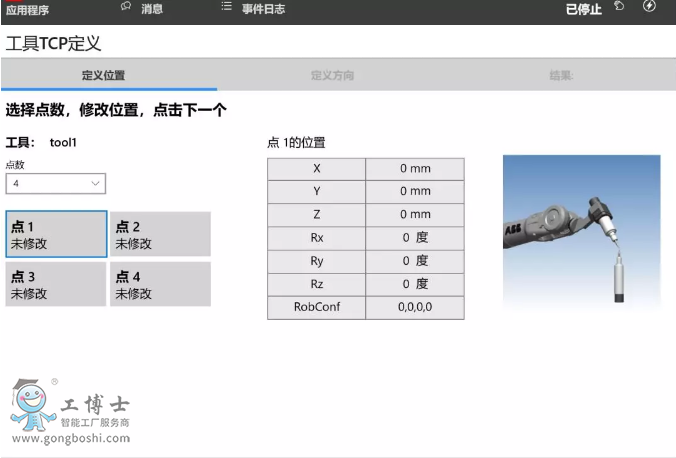
进入定义工具界面,如下,选择几点法,右侧图片实际示教器为动态图,会提示如何示教该点位置(即
ABB机器人以多个不同姿态接近固定点并记录)。完成后点击“下一步”,根据需要定义方向或者完成设置。
关于工件坐标系的设置,进入主菜单,旋转“校准”,选择左侧的“工件坐标”,新建后点击省略号进行定义,如下图。


 联系我们
联系我们



 产品分类
产品分类