ABB机器人Robotstudio基础工作站创建与布局创建与系统配置
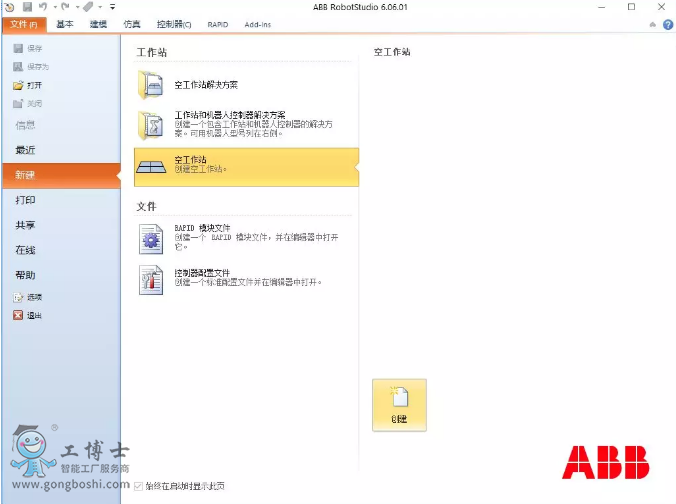
双击桌面图标,打开软件,选择“空工作站”,点击“创建”按钮,如下图所示。
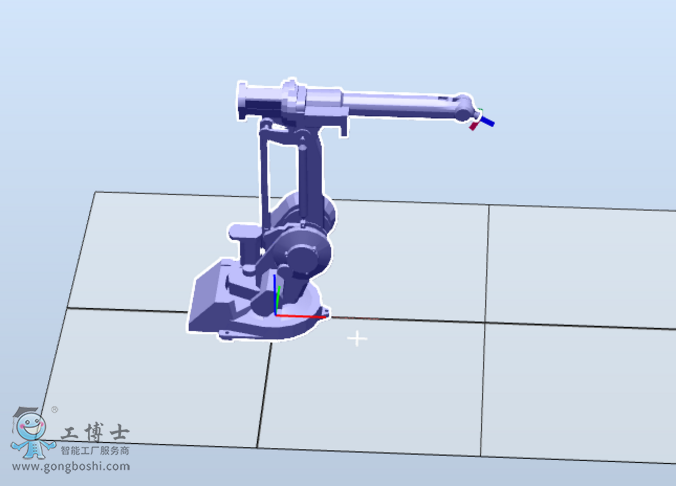
点击“A
BB机器人模型库”工具,在弹出的下拉菜单下选择“IRB 1410”,相应的机器人出现在软件工作区,如下图所示。
点击“导入模型库”工具,选择“设备”→点击(Robot Redstal 1400 H240),模型被添加到工作区,如下图所示。
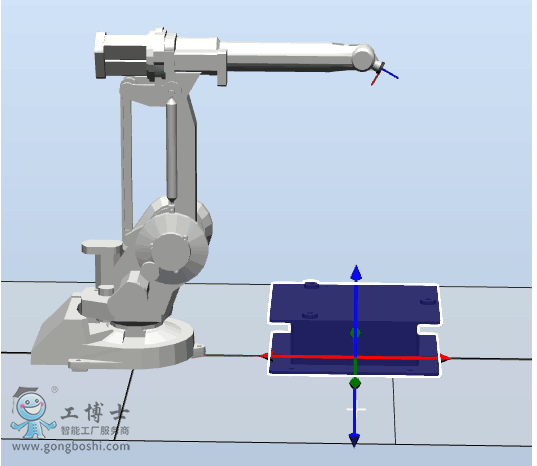
点击“移动”工具,在基座上出现三色直角坐标系,鼠标点击任意坐标轴拖动鼠标,将基座移动到合适位置,如下图所示。
点击“导入模型库”工具,选择“设备”→点击,模型被添加到工作区,如下图所示。
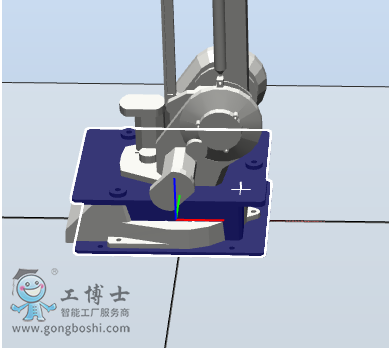
在右侧浏览树中鼠标点击刚添加的工具,并拖动至浏览树中的机器人上,在弹出的对话框中,点击“是”按钮,工具被添加到机器人六轴法兰上,如下图所示。
二、机器人系统配置
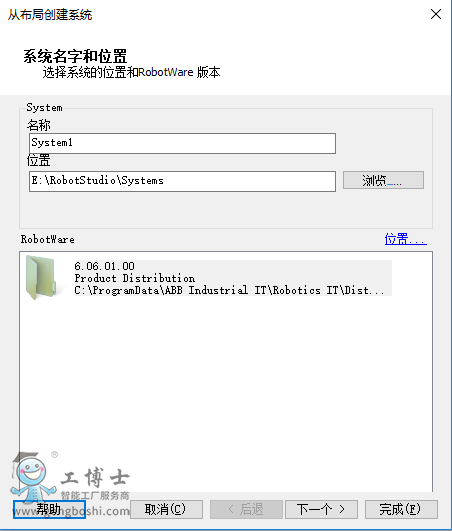
1.点击“
ABB机器人系统”工具,选择,弹出从布局创建系统对话框,输入系统名称、系统保存位置,点击下一个,如下图所示。
点击下一个。
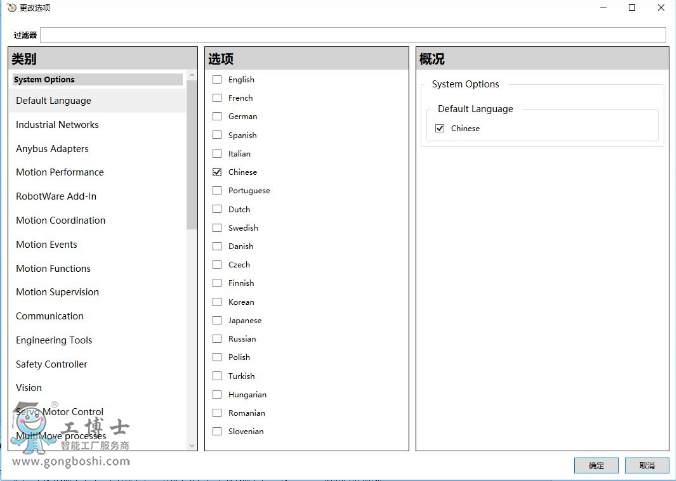
弹出系统选项,点击“选项”按钮,弹出更改选项对话框。在类别下点击“Default Language”,选项下取消勾选English,勾选“Chinese”,为机器人系统选择简体中文语言,如下图所示,点击确定按钮,点击完成按钮。
开始配置机器人系统,在下方状态栏展示进度,如下图所示。
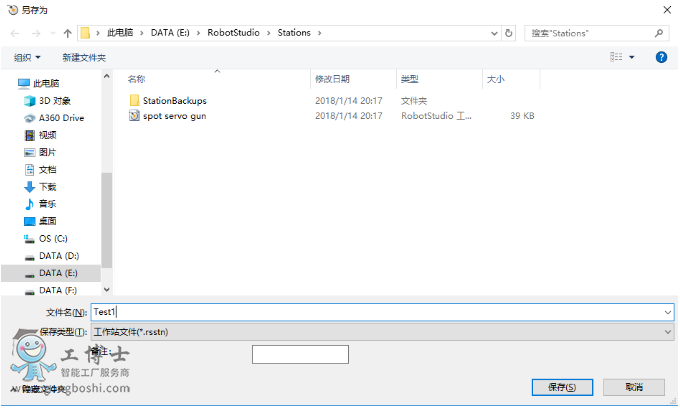
点击“保存”按钮,输入保存名称,保存项目,如下图所示。
更多机器人资讯请点击:
ABB机器人
联系电话:18616560100


 联系我们
联系我们


 产品分类
产品分类