

 联系我们
联系我们

2台ABB机器人DEVICENET 如何应用通讯配置参数应用
1)2台ABB机器人,如果有多个信号要通讯,除了IO接线外,有没有更方便和经济的方法?2)可以使用总线,诸如PROFIENET,ETHERNETIP等,但都需要购买选项
3)大多数机器人都配置了709-1DEVICENETMASTER/SLAVE选项
4)完成两台机器人接线和相应配置后,就可以通过devicenet通讯,经济,快速。
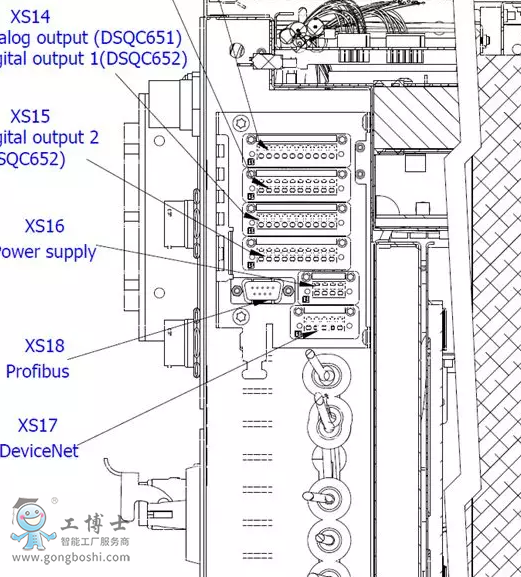
5)如果2台机器人都是compact紧凑柜,则只需把两台ABB机器人的xs17 DEVICENET上的2,4针脚互联,(1和5为柜子供电,不需要互联)原有终端电阻保持(不要拿掉)。
6)Devicenet回路上至少有一个终端电阻,或者链路两端各有一个终端电阻。紧凑柜本身只有一个终端电阻,故2台机器人连接后链路只有2个终端电阻,不需要拆除
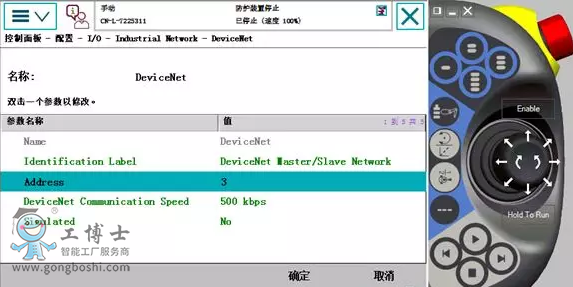
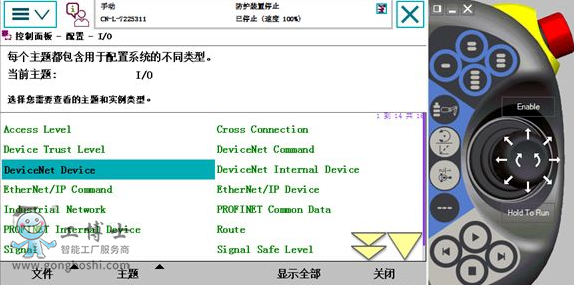
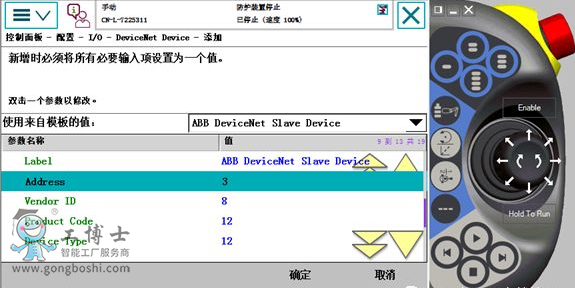
8)打开作为slave的ABB机器人,控制面板-配置-主题IO,IndustryNetwork-Devicenet,设slave的地址(默认为2,如果master为2,slave不能为2,可以比如改为3)





更多机器人资讯请点击:ABB机器人
联系电话:18616560100
