

 联系我们
联系我们

ABB机器人的程序数据
声明:本媒体部分图片、文章来源于网络,
版权归原作者所有,如有侵权,请与我联系删除
任务目标声明:本媒体部分图片、文章来源于网络,
版权归原作者所有,如有侵权,请与我联系删除
掌握程序数据的建立方法。
掌握三个关键程序数据的设定。
了解ABB机器人工具自动识别功能。
5.2任务描述
以bool为例,建立程序数据,练习建立num、robtarget程序数据。
设定机器人的工具数据tooldata、工件坐标wobjdata、负荷数据loaddata。
使用LoadIdentify工具自动识别安装在六轴法兰盘上的工具(tooldata)和载荷(loaddata)的重量,以及重心。
5.3知识储备
5.3.1程序数据
程序数据是在程序模块或系统模块中设定的值和定义的一些环境数据。创建的程序数据由同一个模块或其他模块中的指令进行引用。图中是一条常用的机器人关节运动的指令MoveJ,调用了四个程序数据。

程序数据 数据类型 说明
p10 robtarget 机器人运动目标位置数据
v1000 speeddata 机器人运动速度数据
z50 zonedata 机器人运动转弯数据
tool0 tooldata 机器人工作数据TCP
5.3.2程序数据的类型与分类
1.程序数据的类型分类
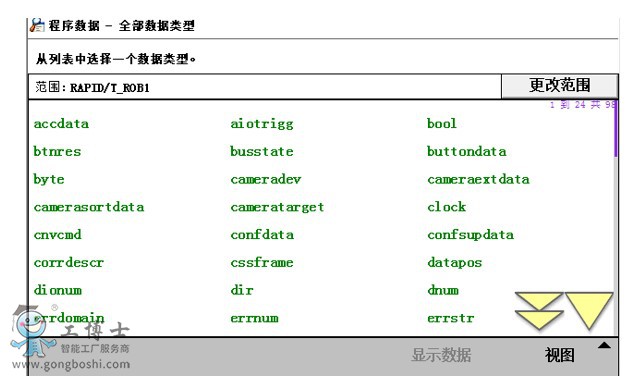
ABB机器人的程序数据共有76个,并且可以根据实际情况进行程序数据的创建,为ABB机器人的程序设计带来了无限可能性。
在示教器的“程序数据”窗口可查看和创建所需要的程序数据。
更多机器人咨询请点击:http://abb-jixieshou.gongboshi.com/
