联系我们
联系我们

ABB机器人的外部轴如何去进行参数调试的基本思路如下
一,ABB机器人对外轴的控制参数的调整的基本步骤l 完成外轴的硬件安装,如电机的安装,SMB盒的安装等;
l 向机器人控制器内加载外轴的临时参数文件;
l 对加载的临时参数进行修改和配置,保证机器人此时能够控制电机的转动;
l 如果客户需要对电机有额外的设置,如抱匝、使能和里控制等,需要额外的配置和设置;
l 等所有的参数设置都完成后开始电机参数的调整。
二、 配置外轴参数
2.1 加载参数
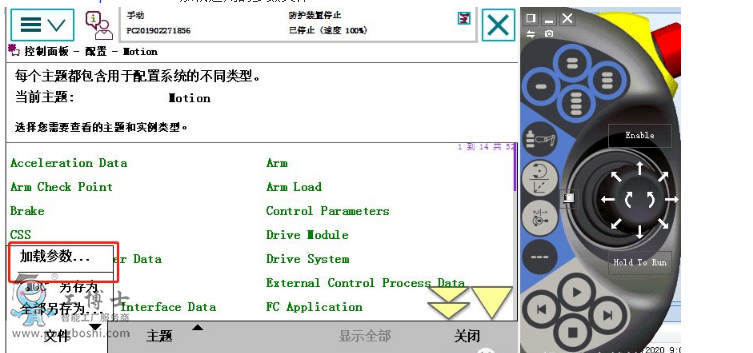
2.1.1在示教器上点击Control Panel进入Configuration选项,选择File ,Load parameters加载通用的参数文件:
2.1.3重启系统。
2.2 配置参数
2.2.1在Motion中选择MechanicalUnit并且定义如下参数
l Name
l Activateat Start Up 开机是否自动激活
l DeactivationForbidden 是否允许禁用该轴
l UseSingle 1
2.2.2在Motion中选择Single定义Single;
l Name
l Single
2.2.3在Motion中选择SingleType定义外轴的种类;
有以下几种选项可以选择:
TRACK; FREE_ROT; EXT_POS; TOOL_ROT;
2.2.4在Motion中选择Joints,为外轴指定外轴的序号;
如:第10个轴对应与robtarget中的eax_d
2.2.5在Motion中选择Arm,定义外轴的运动范围;
l UpperJoint Bound;
l LowerJoint Bound;
2.2.6在Motion中选择AccelerarionData,定义外轴加速和减速运动参数;
l NominalAcceleration;
l NominalDeceleation;
2.2.7在Motion中选择Transmission,定义外轴与传动比相关的参数;(这些参数与减速机相关)
l TransmissionGear Ratio;减速比设置
l RotatingMove 若是旋转轴,为yes;为直线导轨轴,则No
l TransmissionHigh Gear 只有在独立轴时才需要设置
l TransmissionLow Gear 只有在独立轴时才需要设置
2.2.8在Motion中选择MotorType,定义下面的参数;(这些参数有电机供应厂商提供)
l Poleparis
l KePhase to phase (Vs/Rad)
l Maxcurrent (A)
l Phaseresistance(ohm)
l Phaseinductance(H)
2.2.9在Motion中选择MotorCalibration,定义下面的参数;
l Calibrationoffset;通过Fine calibration获得;
l Commutatoroffset:电机供应商提供;
2.2.10 在Motion中选择StressDuty Cycle,定义*大扭矩和*快转速;
l TorqueAbsolute Max;
l SpeedAbsolute Max;
Note:如果Torque Absolute Max太大会造成配置错误,因此通常定义如下:
Torque Absolute Max < 1.732 × Ke Phase to Phase× Max Current;
通过计算出的值适当的减小(5~10);
2.2.11 重启系统;
三、 参数调整
3.1. 检测电机的连接正确性
主要验证以下几项功能:
l 寻找同步永磁电机的Commutation的值;
l 检查电机的相序是否正确;
l 检查电机的电机对是否设置正确;
l 检查Resolver的连接是否良好。
3.1.1 在Motion中选择Drivesystem,将Current_vector_on设置为TRUE,然后重新启动系统,并且运行程序Commutation;
Debug → Call Service Routine →Commutation。
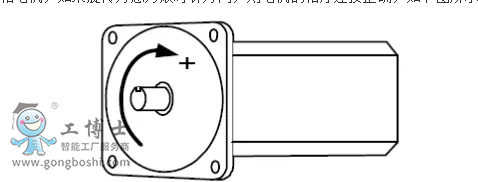
3.1.2 检查电机的相序连接是否正确;通过示校器控制电机的相正方向旋转,从安装杆看相电机,如果旋转方想为顺时针方向,则电机的相序连接正确,如下图所示:
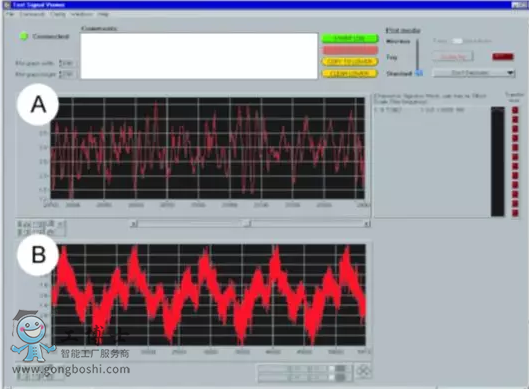
3.3. 按照下图设置Test signal Viewer软件
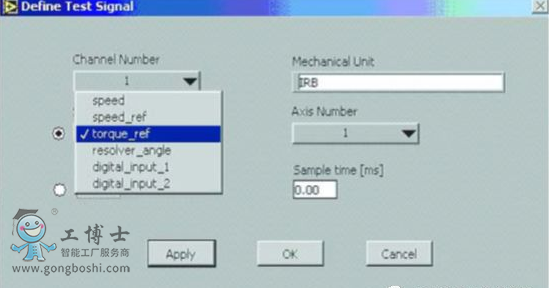
注意:具体的Test signal Viewer操作参看手册ABBTest Signal Viewer.pdf;
3.4. 初步调整Kv,Kp,Ti;
3.4.1 调整Kv(方法一)
l 将Lag control master 0 中的参数 FFW Mode 设置为No;
l 将Kp设置为3(记录Kp的初始值);将Ti设置为10(记录Ti的初始值),重启系统让新的参数生效;
l 按照下列程序逐步增加Kv的值,增幅为10%,观看Test signal viewer中的Torque_ref信号,当电机出现不稳定,即电机有明显的振动和声音,停止运行程序。
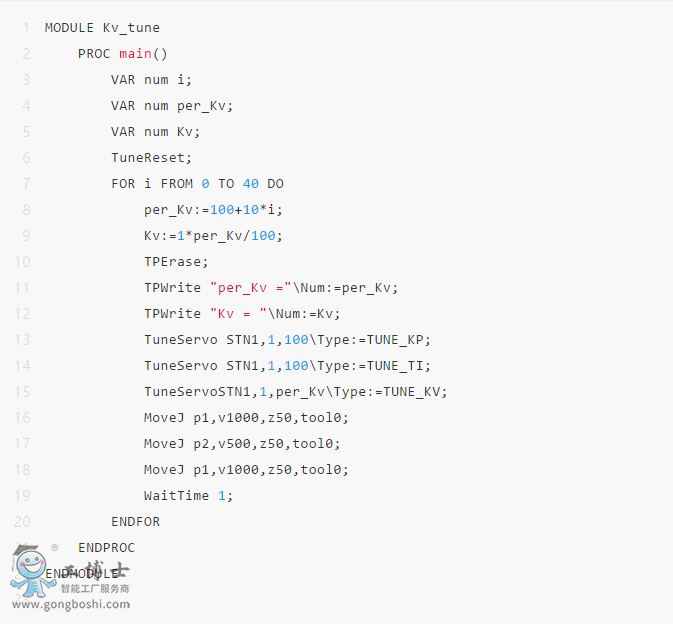
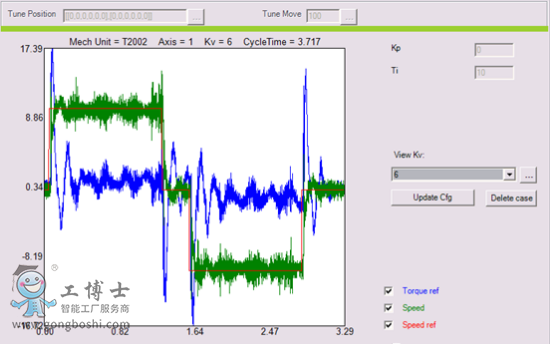
调整Kv方法二:
采用ABB提供的标准的外轴调整软件,tune master进行参数调整,如下图所示,当电机的速度出现明显的抖动,然后将此Kv值除以2.5